Meet the Experts in Algorithmic Robotics & Motion Planning
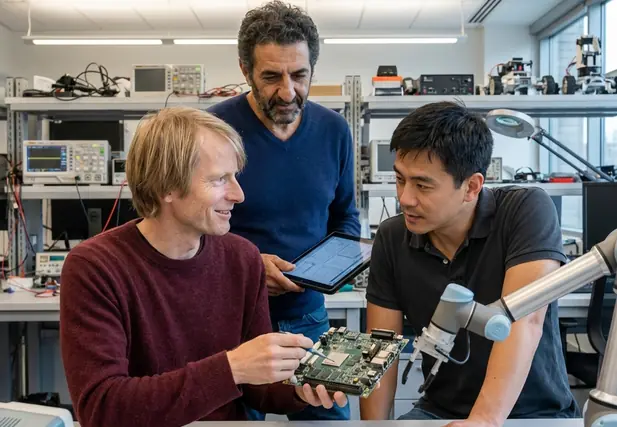
PRACSYS Lab is a hands-on research group focused on motion planning, manipulation, and autonomous systems—built by people who write the proofs, ship the code, and test it on real robots.
Multidisciplinary Excellence in Robotics
"Algorithmic robotics" isn't a slogan—it's the uncomfortable middle ground between theory that should work and systems that actually do.
We keep the team intentionally mixed: motion planning researchers who care about asymptotic behavior, systems engineers who care about latency, and perception specialists who care about what the sensors can realistically support. That mix matters most when a planner looks clean on paper but collapses under contact, drift, or timing jitter.
Our default workflow is simple: define the constraint, encode it, and then try to break it in simulation before we trust it on hardware.
Principal Investigator
Kostas Bekris
Principal Investigator
Kostas Bekris oversees the development of foundational algorithms for motion planning and robotic manipulation.
How this leadership shows up in practice: the PI stays close to the algorithmic core—problem formulation, correctness arguments, and the "what breaks first" review when we move from a benchmark to a real platform.
Senior Research Scientists & Engineers
This group is where ideas get stress-tested: high-dimensional planning, real-time optimization, scalable sampling, and perception that respects physics.

Andrew Dobson
Senior Research Scientist
Andrew Dobson specializes in the empirical validation of motion planning algorithms within high-dimensional configuration spaces.

Andrew Kimmel
Lead Systems Architect
Andrew Kimmel drives the development of real-time trajectory optimization for autonomous navigation systems.

Zakary Littlefield
Senior Research Engineer
Zakary Littlefield develops scalable sampling-based planning algorithms for complex robotic systems.

David Surovik
Senior Perception Engineer
David Surovik specializes in integrating physics-based constraints into robotic perception and sensor fusion pipelines.
Athanasios Krontiris
Principal Robotics Engineer
Athanasios Krontiris leads research into decentralized multi-agent systems and formal verification of robotic protocols.
What we look for in reviews: a planner that is fast but brittle is not "better." We ask for failure cases, parameter sensitivity, and the exact assumptions that make the math go through.
Research Associates & Specialists
These roles keep the lab honest: they chase the edge cases and connect planning to dynamics, stability, and domain-specific constraints.

Isaac Yochelson
Research Associate
Isaac Yochelson investigates the impact of kinodynamic constraints on the stability of autonomous systems.
Min Zhao
Computational Biomechanics Researcher
Min Zhao applies algorithmic robotics principles to the modeling of complex biological systems and surgical automation.
Collaborative Scope & Extended Network
Robotics research rarely stays inside one lab boundary; the hard problems force you to borrow tools and share infrastructure.
We work across motion planning, autonomous navigation, manipulation, and computational biomedicine, depending on what the problem demands. Some projects are tightly coupled to a specific platform; others are algorithm-first and only later get mapped onto hardware constraints.
A practical note: results can hinge on the robot model fidelity and the sensing stack, so we document assumptions early and revisit them when the platform changes.
Join Our Research
If you like debugging the gap between "should work" and "works every time," you'll fit in here.
We're most productive with people who can write clearly about constraints, defend design choices, and run careful experiments. Bring a concrete question you want to answer—then expect to spend time on the unglamorous parts: instrumentation, ablations, and reproducing failures.
Reach out to discuss research roles, collaborations, or student opportunities with PRACSYS Lab.
Contact the Lab