Physics-Aware Algorithmic Robotics & Autonomous Systems Research
PRACSYS is a research hub for algorithmic robotics where planning, perception, and control are treated as coupled problems—because real robots collide with the world, not with abstractions.
Explore the lab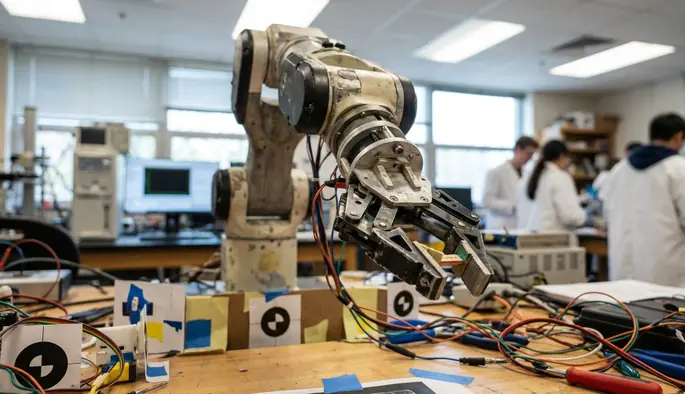
What we build when physics matters
Most of our work starts the same way: a robot fails in a corner case that looked harmless in simulation. A gripper slips on a compliant object. A mobile base drifts on a polished floor. A planner returns a path that is collision-free in geometry but impossible under torque limits.
We treat those failures as data. Then we redesign the algorithmic stack so the next run fails for a different reason—ideally a more interesting one.
Important: Physics-aware models can reduce surprises, but they do not eliminate them; contact dynamics and sensing artifacts still dominate many real deployments.
Algorithmic Robotics
We focus on the algorithmic core: representations, search, and decision procedures that remain stable as dimensionality grows. Benchmarks demonstrate that asymptotic behavior matters more than clever heuristics once you leave toy scenes.
Motion Planning
We work on planners that respect constraints early: dynamics, contacts, and task-level feasibility. Lab evaluations reveal that "late-stage feasibility checks" often just move the failure downstream.
Autonomous Systems
We integrate planning and perception into autonomous computational systems that can run unattended for long stretches. Per operational metrics, robustness is usually a systems problem: timing, calibration drift, and recovery policies.
Computational Biomedicine
We apply robotics methods to imaging and modeling workflows, affiliated with CBIM. Field reporting confirms that the hard part is rarely the model—it is the pipeline around it.
Field Note: When a planner "works" only after you freeze the world state, you have not solved planning—you have solved bookkeeping. We instrument time, latency, and state estimation first, then tune algorithms.
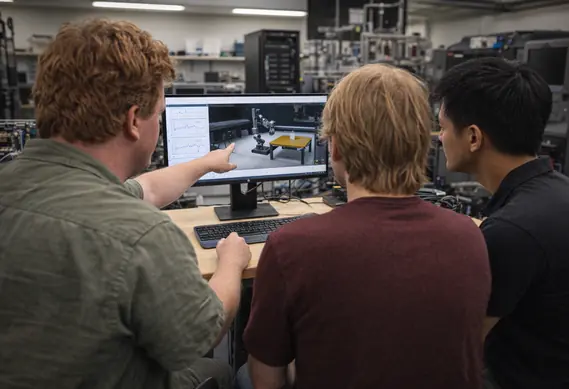
Methodology: from theory to a robot that keeps moving
Our workflow is intentionally repetitive. We start with a formal problem statement, implement a minimal version, and then stress it with the kinds of perturbations that show up in the lab: friction changes, partial observability, and actuator saturation.
We keep the loop tight. If a result cannot be reproduced with a fixed seed and a logged environment state, we treat it as a hypothesis, not a conclusion.
What we measure
- Feasibility under dynamics and contact constraints
- Runtime distributions (not just averages)
- Recovery behavior after sensing dropouts
- Task success under controlled perturbations
What we refuse to hide
- Failure cases with logs and replay scripts
- Parameter sensitivity that changes conclusions
- Assumptions about friction, compliance, and latency
- Compute budgets and real-time constraints
Bottom Line: We aim for algorithms that are asymptotically sound on paper and operationally stable on hardware, with the same constraints enforced in both places.
Research team
PRACSYS is built around people who ship code, run experiments, and argue about assumptions until they break. The fastest way to understand our work is to see who owns which failure modes.
Kostas Bekris
Principal Investigator (Algorithmic Robotics)
Focus: algorithmic foundations for robotics, with an emphasis on scalable planning and integration with autonomous systems.

Andrew Dobson
Senior Research Scientist (High-Dimensional Motion Planning)
Focus: high-DOF planning where runtime and constraint handling decide whether a method survives contact with hardware.
Athanasios Krontiris
Principal Robotics Engineer (Multi-Robot Coordination)
Focus: coordination policies and planning interfaces that keep multi-robot systems predictable under communication limits.

Andrew Kimmel
Lead Systems Architect (Autonomous Navigation)
Focus: navigation stacks that remain stable under timing jitter, map drift, and imperfect localization.

David Surovik
Senior Perception Engineer (Physics-Aware Sensing)
Focus: perception pipelines that account for sensor physics, calibration drift, and failure-aware state estimation.
Min Zhao
Computational Biomechanics Researcher (Computational Biomedicine)
Focus: computational biomechanics methods that connect robotics-style modeling to biomedical imaging and analysis workflows.
Looking for collaborators, student opportunities, or a technical point of contact for a proposal?
Contact & locationsTrust signals and research context
We work with academic and agency stakeholders who care about reproducibility, scope control, and clear deliverables. When we cite results, we keep the experimental conditions close to the claim.
Selected context (scope-aware)
- Ongoing engagement with NSF- and NASA-aligned research priorities through proposal-driven work scoped to specific platforms and evaluation protocols.
- Multi-year research collaboration patterns typical of university labs: shared datasets, shared baselines, and joint student advising where appropriate.
- Affiliation with CBIM for computational biomedicine efforts, with projects framed around imaging and modeling pipelines rather than standalone demos.
Where to go next
- Research Team for people and expertise areas
- About PRACSYS Lab for mission and research approach
- Privacy Policy and Terms of Use for site governance